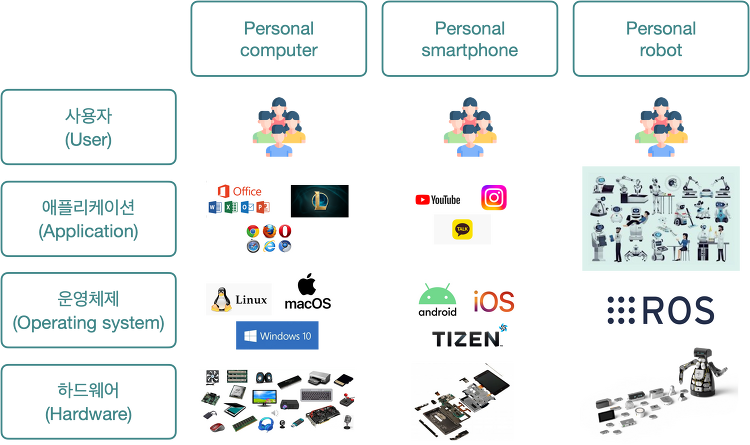
ROS란 무엇일까? ROS는 open-source이며, robot을 위한 meta-operating system임 robot SW 개발을 위한 다양한 서비스와 기능을 제공 hardware abstraction low-level device control implementation of commonly-used functionality message-passing between processes package management 또 robot 개발을 위한 다양한 도구들과 라이브러리들을 제공 이를 통해 여러 컴퓨터에서 robot SW source code를 obtaining, biulding, writing, running 할 수 있음 목적 : robot SW 개발을 전 세계에서 공동 작업할 수 있도록 생태..