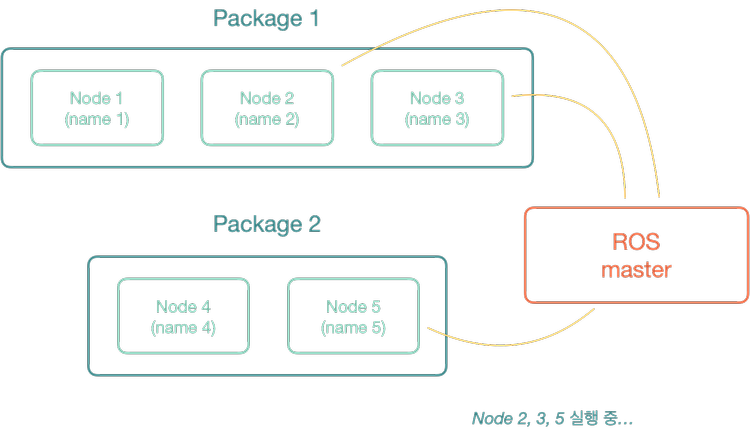
ROS의 기본 용어 및 개념 정리 Node(노드) : 최소 단위의 실행 가능한 프로세스. 하나의 실행이 가능한 프로그램으로 생각할 수 있음. ROS에서의 최소 실행단위가 노드이며 이를 프로그램으로 두고 나누어 작업하도록 함. 각 노드는 메시지 통신으로 데이터를 주고받음. Package(패키지) : 하나 이상의 노드를 포함하며 노드 실행을 수행하기 위한 정보들을 묶어 놓은 것임. 또 이러한 패키지의 묶음을 meta-package(메타-패키지)로 분리하기도 함. message(메시지) : 메시지를 통해 노드 간의 데이터를 주고받을 수 있음. 메시지는 integer, floating, point, boolean과 같은 변수의 형태를 지님. 또 메시지 안에 메시지를 포함하는 데이터 구조 및 메시지의 배열 같은 ..