Study/Engineering
2차원, 3차원 회전 행렬(rotation matrix)
13.d_dk
2022. 9. 8. 08:29
728x90
반응형
2차원 회전 행렬
- ‘회전’은 어떤 기준을 중심으로 발생됨
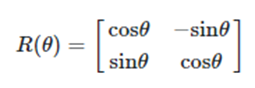
- 2차원에서 어떤 기준을 중심으로 특정 각도(𝜃)만큼 회전하는 것을 다음과 같이 그림과 수식으로 표현할 수 있음


- 즉, 2차원에서의 변환 행렬 𝑅(𝜃)은 다음과 같음
3차원 회전 행렬
- 3차원 회전은 특정 축(axis)로 회전이 되므로 x, y, z 각 축으로 확장하여 회전 행렬을 만들 수 있음
(x축 회전 : 𝑅_𝑥 (𝜃), y축 회전 : 𝑅_𝑦 (𝜃), z축 회전 : 𝑅_𝑧 (𝜃))

- X축, Y축, Z축 회전의 양을 각각 roll, pitch, yaw로 표현하기도 함

- X축을 기준으로 회전한 roll 각도 값을 𝛾로, Y축을 기준으로 회전한 pitch 각도 값을 β로, Z축을 기준으로 회전한 yaw 각도 값을 α로 두고 3차원 회전 행렬을 표현할 수 있음

- 이 회전 행렬을 모두 풀어서 연산하면 다음과 같음

Reference
- https://en.wikipedia.org/wiki/Aircraft_principal_axes
- https://gaussian37.github.io/math-la-rotation_matrix/
회전 변환 행렬 (2D, 3D)
gaussian37's blog
gaussian37.github.io
Aircraft principal axes - Wikipedia
From Wikipedia, the free encyclopedia Jump to navigation Jump to search Principal directions in aviation The position of all three axes, with the right-hand rule for describing the angle of its rotations An aircraft in flight is free to rotate in three dim
en.wikipedia.org
반응형